Scissor joint in practice #
A scissor joint is an intersection of members, in which the transmission of forces is possible, but moments are not.

In order to build a model as simple as possible, the two members should be on the same plane. If no special measures are taken, the node is assumed to be completely rigid. Defining end releases at the intersection of the members means that the bending moments are not transmitted within them.
Modeling #
The insertion of the beams is done on the same plane. The two lines have a common node at the center, so for the time being they are completely rigidly interconnected (with respect to displacement and bending).

As a first step, the connection between the beams is completely removed. This is done with the function “Remove nodes” (tab “Geometry”). If two beams do not have any common nodes, no static connection exists.
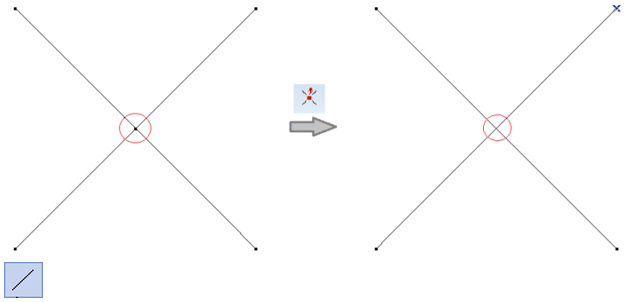
To define the scissor node, a geometry line is inserted, which connects both lines. The endpoint of this line cannot be exactly on the intersection of the beams, but minimally displaced.
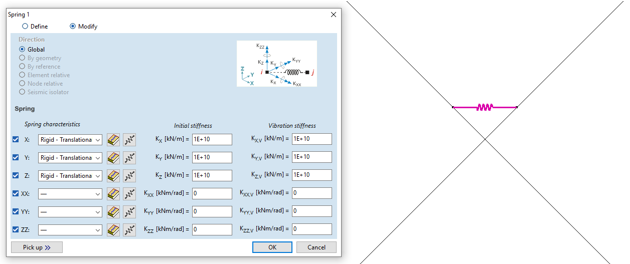
Then to define the connection, a “spring” can be used (tab “Elements”).
- Kx=Ky=Kz=1e10 kN/m
- Rigid connection concerning the displacement in all directions
- Transmission of all forces
- Kxx=Kyy=Kzz=0 kNm/rad
- No connection concerning rotation around all axes
- No transmission of moments
Indication of a point at a certain distance #
Through the coordinate pallette, a node can be inserted with a user-defined distance from the relative origin (insertion point).

- Set the relative origin (insertion point) to the intersection of both lines
- Point with the mouse to the desired point (without clicking)
- Set the relative origin with the [Insert] button
- Activate the insert of a length by pressing the [L] button
- Insert the distance with the numeric keys and confirm the insertion by pressing [Enter]
Source of information www.ingware.com
