Introduction #
The goal of the footfall analysis is to determine and check the accelerations due to human induced vibrations, which may result in the decrease of the comfort or may have influence on sensitive instruments or even can decrease the serviceability of the building.
The main purpose of this guide is to give a better insight into the built-in procedures to help the understanding. The approaches, we introduce here are based on the works: „A Design Guide for Footfall Induced Vibration of Structures”, [1] and “Design of Floors for Vibration: A New Approach”, [2].
During the setup of the model it is important to take into account the fact that the structures are stiffer for dynamical loads. The setting of the supports, connections between the structural members, edge hinges must reflect stiffer behaviour for dynamical loads than what is assumed for statical loads.
THEORY AND BACKGROUND #
VIBRATION CHARACTERISTIC #
The response of a system for forced vibration consists of two parts: a transient part and a steady-state part. The response for footfalls can have two different characteristics. If the structure is „stiff” (the first, dominant, vertical directional mode’s frequency is larger than four times the fundamental frequency of walking) then the steady-state solution is negligible beside the transient solution because between two steps the vibrations decay due to the large stiffness and damping. In this case the excitation can be modeled as a series of impacts on the structure. An example can be found in Figure 1(a). We would like to emphasize here that in this case we neglect the superposition of the consecutive footfalls, which is acceptable if we assume the decay of the vibration between two steps. The transient vibration is a free vibration response of the system, which relates to given initial conditions, so the frequency content of the response consists of the eigenfrequencies of the system, so evidently the forcing frequencies do not appear in this solution.
 |
 |
| a) | b) |
Possible acceleration response characteristics: series of transient vibrations due to impacts on a „stiffer” structure (a),
steady-state solution due to continuous excitation force on a „softer” structure (b).
On the other hand, if the structure is „softer”, so there exists an eigenfrequency, which is smaller than four times the fundamental frequency of walking, than resonance may appear if the force is not orthogonal to the eigenshape. Resonance appears if the fundamental frequency or one of the overtones (integer multiple of the fundamental frequency) is equal to one of the structure’s eigenfrequencies. In this situation the transient solution is negligible beside the steady-state solution. The amplitude of the acceleration becomes constant after a while, see Figure 2(b). It is important to note that as one can see time is needed for the evolution of the steady-state amplitude, so maximal accelerations can only evolve in unfavourable situations, when the structure undergoes long resonant forcing.
CALCULATION OF THE RESPONSE FACTOR #
Transient vibration #
| The function of the vertical velocity obtained from $N_{tr}$ eigenshapes, where the indice of the analyzed node is r, while indice of the forced node is e: |
 | (1) |
where
$N_{tr}$: is the analysed number of eigenshapes,
$f_m$: mth eigenfrequency,
$\zeta$: critical damping ratio, see [1] Table A2,
$\mu_{e,m}$ : the vertical directional displacement of the forced node (indice: e), on the mth mode,
$\mu_ {r,m}$ : the vertical directional displacement of the analysed node (indice: r), on the mth mode,
$l_{eff,m}$: impulse load of a footfall, see [1] Equation (4.10),
$m_m$: modal mass of the mth eigenshape, which is equal to 1, if the shapes are normalized to the mass,
$t$ : time.
The average velocity can be obtained in the following form:
 | (2) |
where $T$: period of one step $=\frac{1}{f_p}$. This yields the response factor:
 | (3) |
where, $f_1$ is the fundamental frequency of the structure. This frequency is one of the eigenfrequency ($f_m$), which has the largest coefficient in the summation, see above Equation (1). Equation (3) contains the effect of the frequency sensitivity, which describes the fact that the sensitivity of the human body depends on the frequency of the response signal of the structure not just the maximal acceleration of it
Steady-state vibration #
The real and imaginary part of the acceleration relating to hth overtone and mth eigenshape:
  | (4) |
where,
$h$: number of harmonics,
$f_m$: mth eigenfrequency,
$F_h$: the Fourier coefficient, which relates to the hth harmonic,
$ \mu_{e,m}$ : the vertical directional displacement of the forced node (indice: e), on the mth eigenshape,
$ \mu_{r,m}$ : the vertical directional displacement of the analysed node (indice: r), on the mth eigenshape,
$\rho$: resonance build-up factor,  where N is the number of footsteps,
where N is the number of footsteps,
$m_m$: modal mass of the mth eigenshape, which is equal to 1, if the shapes are normalized to the mass,
 ,
,  : parameters.
: parameters.
The acceleration component, which relates to the hth harmonic can be expressed int he following way:
 | (5) |
where, $N_{st}$ is the number of eigenshapes, taken into account. The response factor of the hth harmonic:
 | (6) |
which expression contains the effect of frequency sensitivity, like the one above. The response factor taking into account all the harmonics:  , which is an SRSS summation of the four harmonics.
, which is an SRSS summation of the four harmonics.
The response factor of the analyzed node, r (e: the indice of the forced node):
 | (7) |
so, we maximize the responses with respect to the indice e, furthermore we calculate these two maximums , one for the transient and one for the steady state solution, and associate the larger one to node r.
Introduction of Procedure CCIP-016 #
Transient vibration #
The function of the vertical acceleration obtained from $N_{tr}$ eigenshapes, where the indice of the analyzed node is r, while indice of the forced node is e:
 | (8) |
- $N_{tr}$: is the analyzed number of eigenshapes,
- $f_n$: nth eigenfrequency,
- $\zeta$: critical damping ratio, see [2] Table 4.1.,
- $\mu_{e,n}$: the vertical directional displacement of the forced node (indice: e), on the nth mode,
- $\mu_{r,n}$: the vertical directional displacement of the analyzed node (indice: r), on the nth mode,
- $F_1$: impulse load of a footfall,
- $M_n$: modal mass of the nth eigenshape, which is equal to 1, if the shapes are normalized to the mass,
- $t$: time,
- $W_n$: frequency-dependent weighting function, which relates to the nth mode, see [2].
The averaging acceleration obtained from the time-dependent acceleration, see Equation (8):
 | (9) |
where $T$: period of one step $=\frac{1}{f_p}$.
Steady-state vibration #
The acceleration function with H harmonics and $N_{st}$ eigenshapes:
 | (10) |
where,
- $N_{st}$: is the analyzed number of eigenshapes,
- $f_p$: pathing, fundamental frequency of walking,
- $\mu_{e,n}$: the vertical directional displacement of the forced node (indice: e), on the nth mode,
- $\mu_{r,n}$: the vertical directional displacement of the analyzed node (indice: r), on the nth mode,
- $F_h$: the Fourier coefficient, which relates to the hth harmonic, see [2],
- $M_n$: modal mass of the nth eigenshape, which is equal to 1, if the shapes are normalized to the mass,
- $t$: time,
- $D_n,h$: response factor (nth shape, hth harmonic), see [2],
- :$\phi_n$, $\phi_{n,h}$: phase angles (nth shape, hth harmonic), see [2],
- $W_n$: frequency-dependent weighting function, which relates to the nth mode, see [2].
During the analysis of the steady-state solution (in both procedures) those eigenshapes are taken into account, which have eigenfrequency smaller than the fundamental frequency times the number of harmonics ( )+2Hz (cut-off limit). Above this limit there is no significant increment in the acceleration. First, we summarize the acceleration components with respect to the harmonics and after that the acceleration amplitude can be obtained by an SRSS summation with respect to the shapes. And according to this one can obtain the vertical acceleration of the node r, when the node e is excited, see Equation (11).
 | (11) |
 |
In the case of resonant vibration time is needed to achieve the maximal acceleration value, see again Figure 1(b), due to this fact we can decrease the steady state solutions: | |
|---|---|---|
 |
(12) |
|
Figure 2. Resonance build-up factor as a function of the length of the walking path,  , ,  |
ϱ resonance build-up factor:  where where |
|
|
||
According to this the response acceleration, which relates to the analyzed node r:
 | (13) |
which yields the dimensionless response factor of the analyzed node r:
 | (14) |
THE IMPLEMENTATION OF THE PROCEDURE IN AxisVM #

Active Footfall analysis
If vibration results relate to the model, then the Footfall analysis button becomes active, see Figure 3. In Figure 4. the Footfall analysis windows can be found. The procedure will begin after clicking on „OK”, if the model contains surface elements and among them there exists at least one element, at which the angle between its normal and the direction of gravity is smaller then 70o. The procedure considers a surface element a floor element if the angle between the normal and the gravity is less then or equal to , if the angle is 10o-70o, then the surface assumed to be stair, to which different frequency limits, Fourier coefficients relate to (only in SCI P354 procedure). On nodes, which relate to walls or rods the program does not apply forcing and does not analyze the accelerations of these nodes.

The vibration response factor procedure is a computationally expensive calculation, so the program offers some simplification in the analysis, which can significantly shorten the runtime.
Modal shapes to use #
- All modal shapes for the load cases/combinations: if the user set this radio button, then all the eigenshapes, which relate to the load case or combination are taken into account. So, the number of eigenmodes in the transient analysis, , see above is equal to the number of modes, which relate the load case/combination. While for steady-state analysis all the eigenmodes are taken into account till the cut off limit ( , where the cut-off limit is equal to the fundamental frequency times the number of harmonics ( )+2Hz. Above this limit the eigenshapes are not dangerous from the resonance point of view.
- Shapes activated in the table of modal mass factors: the user can switch off modes, which presumably have no effect on the footfall analysis.
- Below a frequency limit: in this setting the user can define a cut-off frequency, above which the software does not take into account the eigenshapes.

If the largest calculated eigenfrequency is below the cut-off limit (see above) or the user switched of an eigenshape below the cut-off limit or the frequency limit is below the cut-off limit, then the name of the load case or combination becomes red, see Figure 5.
Excitation method #
- Full (any node to any node): in this option the analyzed node of a floor or stair gets excited by arbitrary nodes, which relate to floor or stair (the software does not analyze or force nodes which relate to walls).
- Excitation at the extremes of the modal shapes: in this case the excited nodes (e) are limited in such a way that only at the two extremes (min and max) of the modes are excited, see for example Figure 6:


Excitation at the extremes of the modal shapes, excited nodes

- Excitation at the node where the response is analyzed: in this option the forced and the analyzed node is the same, so e = r. This option is usually appropriate if the user is interested in the global maximum of the vibration response spectrum and the goal is to prove the structure’s reliability globally. However, it is suggested to check this result with methods described above.
- Excitation until adjacent stories only: if the model consists of at least three stories, then this checkbox becomes active. If the user switches it on, then the storey of the analyzed node and the storey of the excited one must be the same or must be adjacent. Different load case is not handled.
Damping ratio #
The damping ratio can be chosen according to the works [1] and [2]. The description of the footfall parameters can be found above.
Pace frequency #
During the set up of the pace frequency the user determines the lower and the upper boundary of the analyzed frequency range. In the analysis the software evaluates a list, in which discrete frequencies appear, which cause resonance in the system. If the obtained frequencies are smaller than 20, then by interval halving further elements are added to the list, if it is larger, then elements are deleted from the list. If the maximal difference between two discrete frequencies is larger than 0.1 Hz, then further interval halving is applied. All in all, at the calculation is carried out for at least 20 discrete pace frequencies.
EXAMPLES #
Analysis of an L-shaped planar plate #
Parameters #
The geometric parameters of the analyzed structure are illustrated in Figure 7. The thickness of the plate is constant: 20 cm.

The material of the model relates to C25/30 (EC), Young’s modulus: 𝐸=3150𝑘𝑁/𝑐𝑚2 . The boundary conditions are point-like hinges and line-like hinges, see Figure 7. The number of the nodes: 1870, the analyzed number of modes: 10.
Results #
Figures 8., 9., 10. illustrates the results of the problem with same design method, but with different excitation methods with the notation of the running time. As one can observe, the maximal values are the same, but the characteristics of the envelope functions differ from each other. It is easy to admit that the full excitation is always above (yields larger accelerations) the other excitation methods.



Analysis of a multi-storey building #
Parameters #
The geometric parameters of the structure are illustrated in Figure 11. and 12. The thickness of the plates is constant: 20cm. The cross-sections of the columns are square with size of 40×40 cm.


The material parameters of the model relate to concrete, C16/20 (EC), Young’s modulus: The columns have clamped end. The number of the nodes: 6647, the number of the examined, z-directional modeshapes: 50.
Results #
The results are shown in Figures 13, 14, 15. Only the vibration response factors of the first storey are illustrated with different excitation methods. Figure 13. illustrates the solution of the „exact”, full excitation, while in Figure 14. the results for method excitation at the extremes of modal shapes is plotted and in Figure 15. the results for method excitation at the nodes where the response is analyzed can be seen. As one can see all the three methods show similar maximal value, but the characteristics of the functions are different. If we take advantage from the storey and only nodes on the same or adjacent storeys can force the analyzed one, then the running time can be reduced to 1087 s.

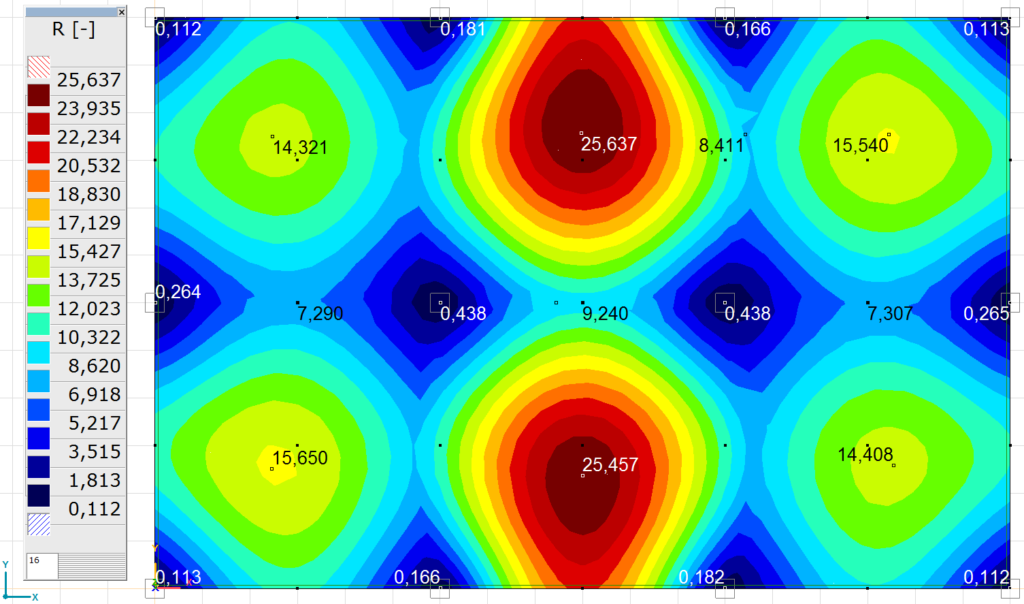 Figure 14. Slab of the first storey, excitation at the extremes of modal shapes, CCIP-016 design method, without analysing the storey of the nodes, running time: 57 sec. Figure 14. Slab of the first storey, excitation at the extremes of modal shapes, CCIP-016 design method, without analysing the storey of the nodes, running time: 57 sec. |  Figure 15. Slab of the first storey, excitation at the nodes where the response is analyzed, CCIP-016 design method, without analyzing the storey of the nodes, running time: 2 sec. Figure 15. Slab of the first storey, excitation at the nodes where the response is analyzed, CCIP-016 design method, without analyzing the storey of the nodes, running time: 2 sec. |
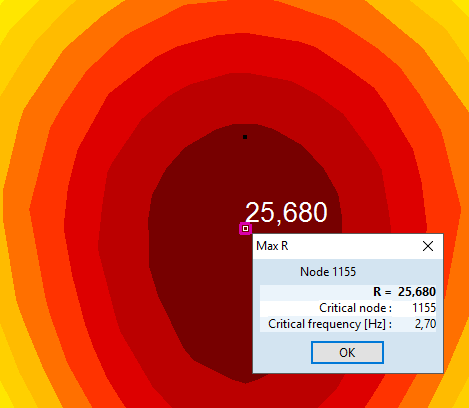
The analysis of the maximal value of the response factors the number of the node on which the maximal response showed up, the maximal value, the forced node, which relates to this most unfavourable case and the critical frequency. In the current case, the critical fundamental frequency is f=2.70 𝐻z. The analysis of the eigenshapes, eigenfrequencies showed that the 30. shape’s eigenfrequency: 𝑓0,30=10.80 𝐻𝑧 and the eigenshape is illustrated in Figure 17. It is easy to admit that this shape resonates with the third overtone of the fundamental frequency, as four times the fundamental frequency is equal to this eigenfrequency.

 ), first storey’s z-directional displacement component.
), first storey’s z-directional displacement component.LIMIT VALUES OF THE RESPONSE FACTOR #
The limit values of the vibration response factor at different standards can be found in Table 1. and 2.
Limit values in BS 6472, [3]: #
|
|
Table 1. Vibration response factor limit values, BS 6472, [3]. |
Limit values in SCI, [4]: #
|
Place |
Continuous vibration |
|
Office |
8 |
|
Shopping mall |
4 [4] |
|
Dealing floor |
4 |
|
Stairs-light use (offices) |
32 [5] |
|
Stairs-heavy use (e.g. public buildings, stadia) |
24 [5] |
BIBLIOGRAPHY #
- Willford, M.R., Young, P. A Design Guide for Footfall Induced Vibration of Structures, Concrete Society, 2006
- Smith, A. L., Hicks, S. J., Devine, P. J.Design of Floors for Vibration: A New Approach, The Steel Construction Institute, Ascot, 2009
- BS 6472:1992 Guide to evaluation of human exposure to vibration in buildings (1 Hz to 80 Hz)
- Wyatt, T. A. Design guide on the vibration of floors, The Steel Construction Institute,1989
- Ellingwood, B. Structural serviceability: Floor vibrations, ASCE Journal of Structural Engineering, 1984
- Bishop, N. W. M., Willford, M., Pumphrey, R. Human induced loading for flexible staircases, Safety Science 18, 1995
